IEEE Transactions on Intelligent Transportation Systems
Authors:
Gledson Melotti, Weihao Lu, Pedro Conde, Dezong Zhao, Alireza Asvadi, Nuno Gonçalves and Cristiano Premebida
Abstract
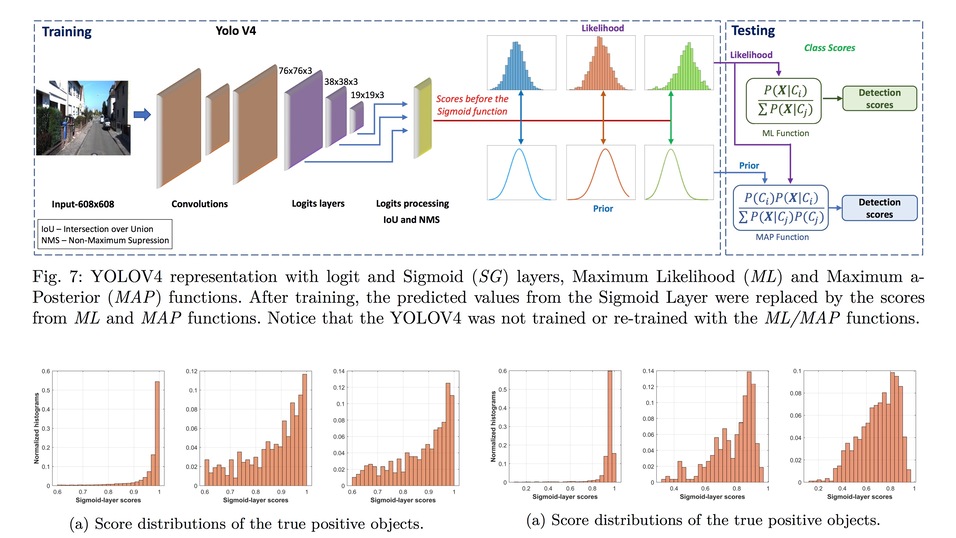
Object detection in autonomous driving applications implies that the detection and tracking of semantic objects are commonly native to urban driving environments, as pedestrians and vehicles. One of the major challenges in state-of-the-art deep-learning based object detection are false positives which oc- cur with overconfident scores. This is highly undesir- able in autonomous driving and other critical robotic- perception domains because of safety concerns. This paper proposes an approach to alleviate the problem of overconfident predictions by introducing a novel probabilistic layer to deep object detection networks in testing. The suggested approach avoids the tradi- tional Sigmoid or Softmax prediction layer which often produces overconfident predictions. It is demonstrated that the proposed technique reduces overconfidence in the false positives without degrading the perfor- mance on the true positives. The approach is validated on the 2D-KITTI objection detection through the YOLOV4 and SECOND (Lidar-based detector). The proposed approach enables interpretable probabilistic predictions without the requirement of re-training the network and therefore is very practical.
Citation
Gledson Melotti, Weihao Lu, Pedro Conde, Dezong Zhao, Alireza Asvadi, Nuno Gonçalves and Cristiano Premebida (2023). Probabilistic approach for road-users detection. IEEE Transactions on Intelligent Transportation Systems. DOI: 10.1109/TITS.2023.3268578.
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
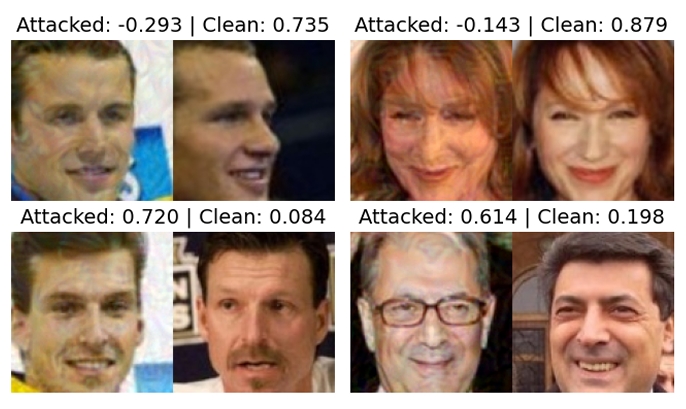
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security