A Framework for Augmented Reality Using Non-Central Catadioptric Cameras
Featured in:
IEEE International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal
Authors:
Tiago Dias, Pedro Miraldo and Nuno Goncalves
Abstract
In this article we propose a framework for the application of augmented reality to non-central catadioptric imaging devices. Considering a virtual object in the world with known 3D coordinates, the goal is to project this object into the image of a non-central catadioptric camera. We propose a solution to this problem which allows us to project texturized objects to the image in realtime, up to 20 fps: projection of 3D segments to the image, occlusions, illumination and shading. To the best of our knowledge this is the first time that this problem is addressed (all state-of-the-art methods are derived for central camera systems). In our experiments, we used a non-central catadioptric camera formed with a perspective camera and a spherical mirror. To test the proposed approach, we define a cube with texturized faces where each of the main steps of the framework is evaluated. To conclude, we used the proposed framework to project to the image the Stanford “bunny” object.
Citation
Tiago Dias, Pedro Miraldo and Nuno Goncalves (2015). A Framework for Augmented Reality using Non-Central Catadioptric Cameras. IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC 2015). DOI: 10.1109/ICARSC.2015.31
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
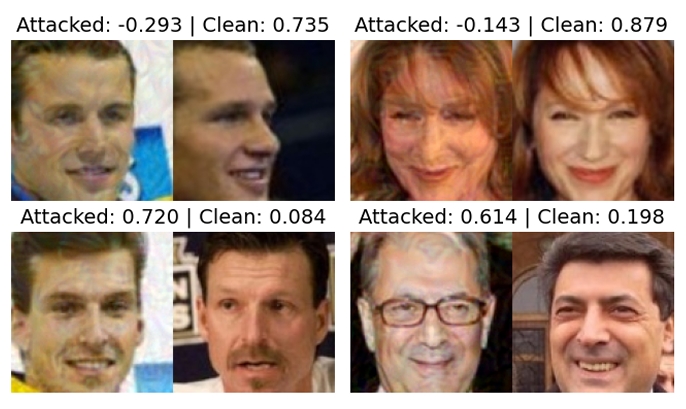
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security