A Framework for Augmented Reality using Non-Central Catadioptric Cameras
Featured in:
Journal of Intelligent & Robotic Systems
Authors:
Tiago Dias, Pedro Miraldo and Nuno Gonçalves
Abstract
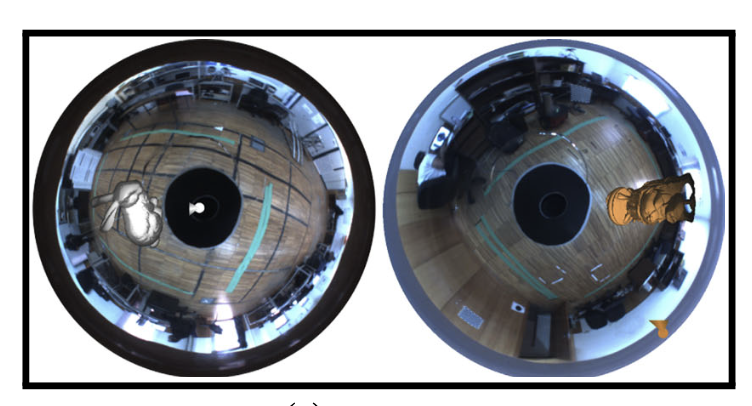
This paper addresses the problem of augmented reality on images acquired from non-central catadioptric systems. We propose a solution which allows the projection of textured objects to images of these type of systems and, depending on the complexity of the objects, can run up to 20 fps, using a 1328×1048 image resolution. The main contributions are related with the image formation of the non-central catadioptric cameras: projection of the 3D segments onto the image of non-central catadioptric cameras; occlusions; and illumination/shading. To validate the proposed solution, we used a non-central zatadioptric camera formed with a perspective camera and a spherical mirror. Also, to test the robustness of the proposed method, we used a regular object (a parallelepiped) and three well known irregular objects in computer graphics: “bunny”, “happy buddha” and “dragon”, from Stanford database.
Citation
Tiago Dias, Pedro Miraldo and Nuno Gonçalves (2016), A Framework for Augmented Reality using Non-Central Catadioptric Cameras. J Intell Robot Syst 83. DOI: 10.1007/s10846-016-0349-9
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
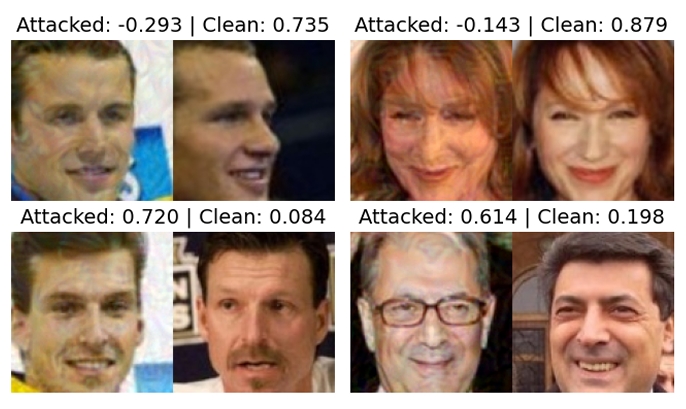
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security