Low-Cost Method for the Estimation of the Shape of Quadric Mirrors and Calibration of Catadioptric Cameras.
Featured in:
Journal of Optical Engineering, Society of Photo-Optical Instrumentation Engineers
Authors:
Nuno Goncalves and Helder Araújo
Abstract
This paper tackles the problem of quadric mirror estimation for omnidirectional imaging systems, as well as the poses of the camera relative to the mirror and to the world reference system. These estimates are obtained for quadric-shaped mirrors (including elliptic, parabolic, hyperbolic, and spherical mirrors) where the positions of the camera and mirror are unconstrained (fully noncentral configurations). The apparent contour of the mirror can be used to reduce the uncertainty in the estimation. Although it can enhance both the accuracy of the estimation (allowing the method to converge from farther initial configurations) and also its performance, its use is not strictly required. The intrinsic parameters of the camera model (pinhole or orthographic) are assumed to be known, as well as the structure of a calibration object in local coordinates. The method is nonlinear, and we use a genetic algorithm in conjunction with the Nelder-Mead simplex algorithm to minimize the objective function. Experimental results using real data are presented, demonstrating the accuracy of this calibration method, comparing its accuracy with and without the apparent contour, and computing its reprojection error. Because the mirror quadric is estimated, this method can also be used to identify and classify the mirror.
Citation
Nuno Goncalves and Helder Araújo. (2007). Low-cost method for the estimation of the shape of quadric mirrors and calibration of catadioptric cameras. Optical Engineering, 46(7), 073001-073001. DOI: 10.1117/1.2752493
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
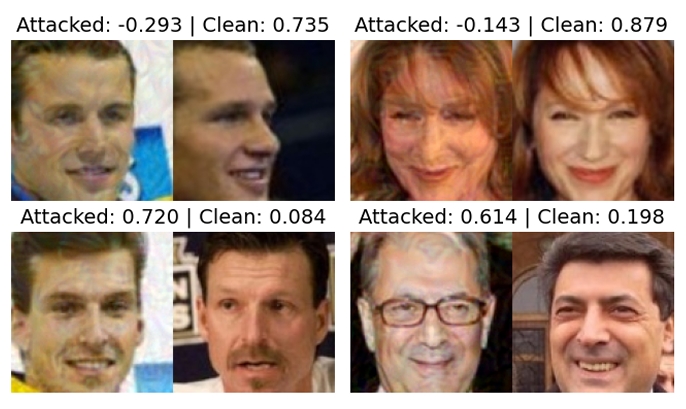
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security