Mirror shape recovery from image curves and intrinsic parameters: Rotationally symmetric and conic mirrors
Featured in:
2003 Conference on Computer Vision and Pattern Recognition Workshop, Madison, USA.
Authors:
Nuno Gonçalves and Helder Araújo
Abstract
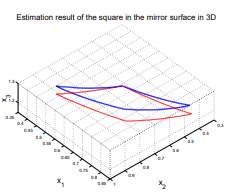
This paper analyzes the problem of the estimation of the local mirror shape in a catadioptric imaging system. We propose a method to recover the 3D coordinates of mirror surface points as long as there are images of those points, i.e., as long as there is an image of a 3D geometric element that is reflected by those points. For that purpose the information required is the image, the intrinsic parameters of the camera, and the 3D coordinates of 3 points in the scene. The estimation of the local shape can be used to calibrate the system even though that problem is not addressed in this paper. We address the problem of the shape recovery for conic shaped mirrors and rotationally symmetric mirrors. Experimental results for synthetic images are presented.
Citation
Nuno Gonçalves and Helder Araújo (2003, June). Mirror shape recovery from image curves and intrinsic parameters: Rotationally symmetric and conic mirrors. In 2003 Conference on Computer Vision and Pattern Recognition Workshop (Vol. 7, pp. 69-69). IEEE. DOI: 10.1109/CVPRW.2003.10078