Object detection in traffic scenarios – a comparison of traditional and deep learning approaches
Featured in:
Computer Science & Information Technology, AIRCC Publishing Corporation
Authors:
Gopi K. Erabati, Nuno Gonçalves and Helder Araújo
Abstract
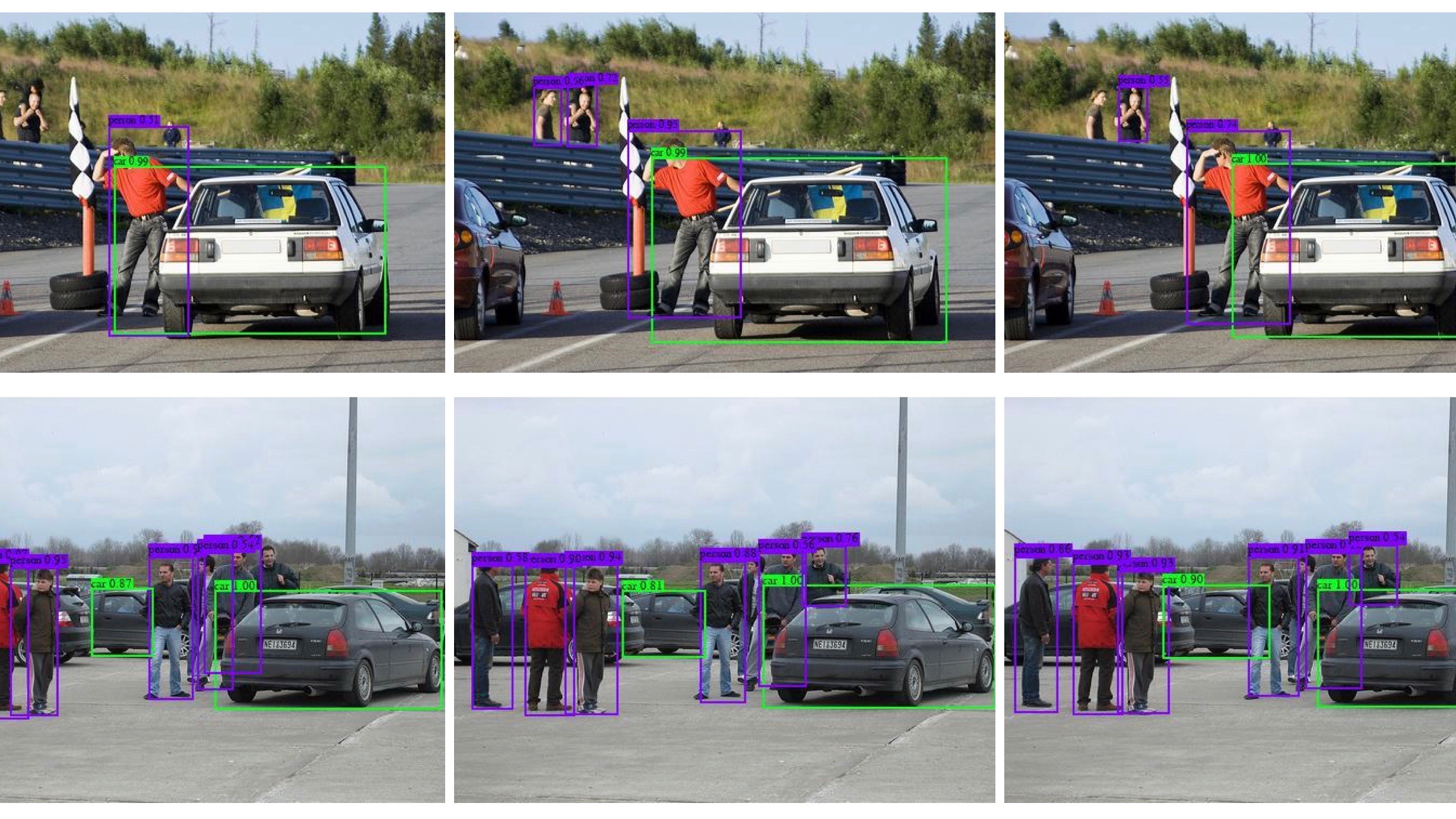
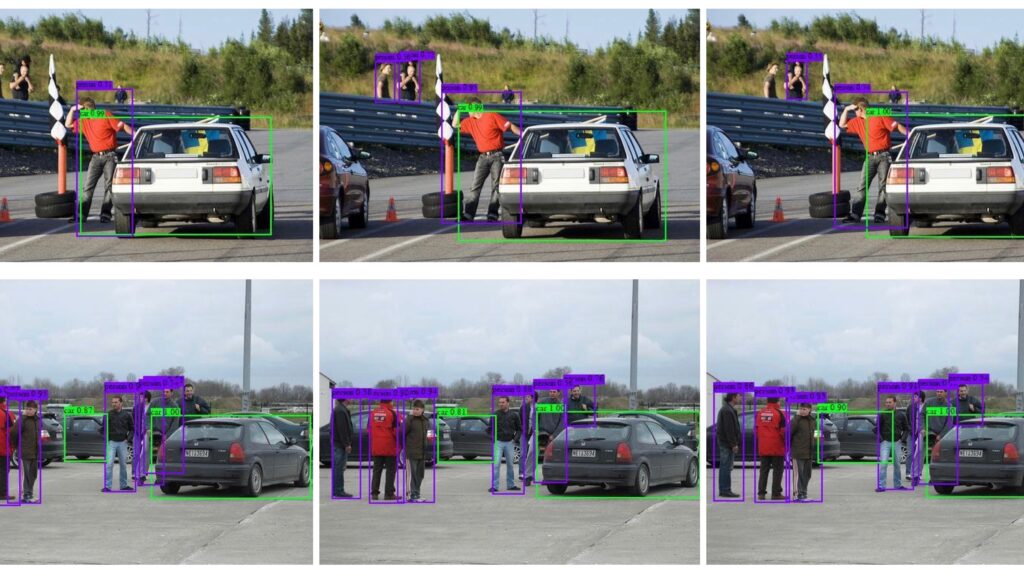
In the area of computer vision, research on object detection algorithms has grown rapidly as it is the fundamental step for automation, specifically for self-driving vehicles. This work presents a comparison of traditional and deep learning approaches for the task of object detection in traffic scenarios. The handcrafted feature descriptor like Histogram of oriented Gradients (HOG) with a linear Support Vector Machine (SVM) classifier is compared with deep learning approaches like Single Shot Detector (SSD) and You Only Look Once (YOLO), in terms of mean Average Precision (mAP) and processing speed. SSD algorithm is implemented with different backbone architectures like VGG16, MobileNetV2 and ResNeXt50, similarly YOLO algorithm with MobileNetV1 and ResNet50, to compare the performance of the approaches. The training and inference is performed on PASCAL VOC 2007 and 2012 training, and
PASCAL VOC 2007 test data respectively. We consider five classes relevant for traffic scenarios, namely, bicycle, bus, car, motorbike and person for the calculation of mAP. Both qualitative and quantitative results are presented for comparison. For the task of object detection, the deep learning approaches outperform the traditional approach both in accuracy and speed. This is achieved at the cost of requiring large amount of data, high computation power and time to train a deep learning approach.
Citation
Gopi K. Erabati, Nuno Gonçalves and Helder Araújo (2020, July). Object Detection in Traffic Scenarios-A Comparison of Traditional and Deep Learning Approaches. In CS & IT Conference Proceedings (Vol. 10, No. 9). CS & IT Conference Proceedings. DOI: 10.5121/csit.2020.100918
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
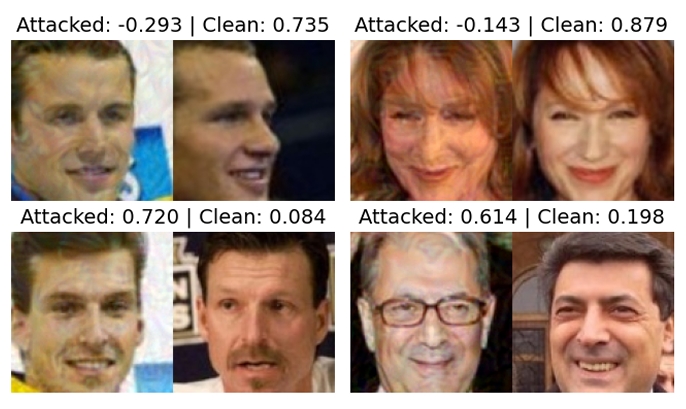
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security