Augmented Reality on Robot Navigation using Non-Central Catadioptric Cameras.
Featured in:
IEEE/RSJ Proc. International Confonference on Intelligent Robots and Systems , Hamburg, Germany
Authors:
Tiago Dias, Pedro Miraldo, Nuno Gonçalves and Pedro Lima
Abstract
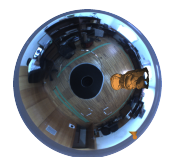
In this paper we present a framework for the application of augmented reality to a mobile robot, using non-central camera systems. Considering a virtual object in the world with known local 3D coordinates, the goal is to project this object into the image of a non-central catadioptric imaging device. We propose a solution to this problem which allows us to project textured objects to the image in real-time (up to 20 fps): projection of 3D segments to the image; occlusions; and illumination. In addition, since we are considering that the imaging device is on a mobile robot, one needs to take into account the real-time localization of the robot. To the best of our knowledge this is the first time that this problem is addressed (all state-of-the-art methods are derived for central camera systems). To evaluate the proposed framework we test the solution using a mobile robot and a non-central catadioptric camera (using a spherical mirror).
Citation
Tiago Dias, Pedro Miraldo, Nuno Gonçalves and Pedro Lima (2015, September). Augmented reality on robot navigation using non-central catadioptric cameras. In 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 4999-5004). IEEE. DOI: 10.1109/IROS.2015.7354080