A Novel Pet Trajectory Prediction Method for Intelligent Plant Cultivation Robot
Featured in:
IEEE Sensors Letters
Authors:
Zihan Jiang, Bo Jin and Yichen Song
Abstract
Intelligent plant cultivation robots will have certain working obstacles due to various moving objects, such as pets. This letter studies how to predict the trajectory of pets to avoid collisions. In previous intelligent plant cultivation robot systems, target-tracking technology was used to track pets and avoid collisions. However, collisions often occur even after tracking the trajectory of the pet because the trajectory of the pet’s movement is difficult to determine. Therefore, the Informer algorithm is used to predict the trajectory of pets in this letter. It is presented that collisions can be avoided based on the predicted trajectory. Experimental results on the data set show that this algorithm has better accuracy than most common algorithms, so trajectory prediction based on this algorithm can make the robot avoid obstacles better. Finally, by verifying two data sets, the public data set and the self-made data set, it is determined that the performance of the proposed method is optimized by 3%–50% compared with other methods.
Citation
Zihan Jiang, Bo Jin and Yichen Song (2023). A Novel Pet Trajectory Prediction Method for Intelligent Plant Cultivation Robot. IEEE Sensors Letters, 7(2), 1-4. DOI: 10.1109/LSENS.2023.3238468
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
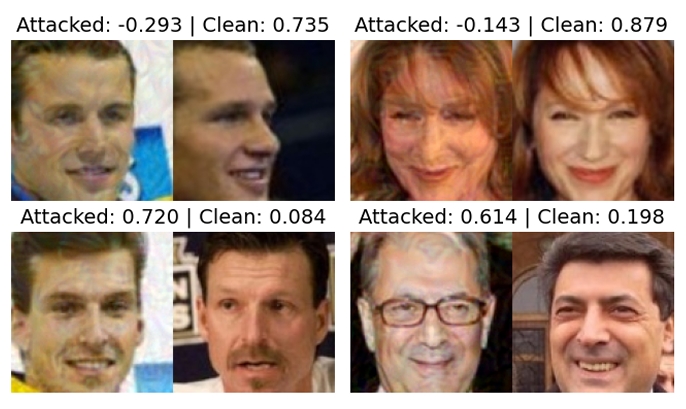
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security