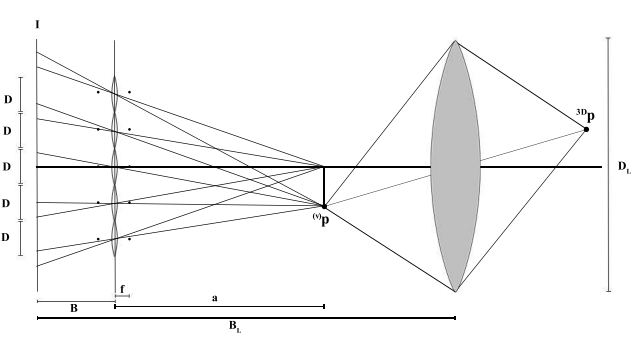
Plenoptic cameras or light field cameras are a recent type of imaging devices that are starting to regain some popularity. These cameras are able to acquire the plenoptic function (4D light field) and, consequently, able to output the depth of a scene, by making use of the redundancy created by the multi-view geometry, where a single 3D point is imaged several times. Despite the attention given in the literature to standard plenoptic cameras, like Lytro, due to their simplicity and lower price, we did our work based on results obtained from a multi-focus plenoptic camera (Raytrix, in our case), due to their quality and higher resolution images. In this master thesis, we present an automatic method to estimate the virtual depth of a scene. Since the capture is done using a multi-focus plenoptic camera, we are working with multi-view geometry and lens with different focal lengths, and we can use that to back trace the rays in order to obtain the depth. We start by finding salient points and their respective correspondences using a scaled SAD (sum of absolute differences) method. In order to perform the referred back trace, obtaining robust results, we developed a RANSAC-like method, which we call COMSAC (Complete Sample Consensus). It is an iterative method that back trace the ligth rays in order to estimate the depth, eliminating the outliers. Finally, and since the depth map obtained is sparse, we developed a way to make it dense, by random growing. Since we used a publicly available dataset from Raytrix, comparisons between our results and the manufacturers’ ones are also presented. A paper was also submitted to 3DV 2014 (International Conference on 3D Vision), a conference on three-dimensional vision.
Citation
João Custódio (2014), Depth Estimation using Light-Field Cameras. MD thesis (in Portuguese). University of Coimbra, 2014.
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
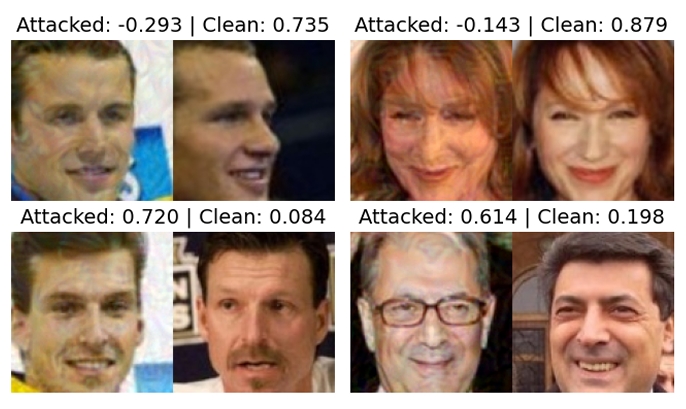
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security