Estimation of 3D Motion from Stereo Images – Uncertainty Analysis and Experimental Results
Featured in:
IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland
Authors:
Nuno Gonçalves and Helder Araújo
Abstract
This paper analyses the problem of motion estimation from a sequence of stereo images. Both the differential and discrete approaches of two methods are formulated The differential approach uses differential optical flow whereas the discrete approaches uses feature correspondences. Both methods are used to compute, first, the 3D velocity in the depth (Z) direction and, second, the complete rigid motion parameters. Furthermore, the uncertainty propagation models for both methods and approaches are derived These models are analysed in order to point out the critical variables for the methods. The methods were extensively tested using synthetic images as well as real images and several conclusions are drawn from the results. The real images are used without any illumination control of the scene in order to study the behavior of the methods in strongly noisy environments with low resolution depth maps.
Citation
Nuno Gonçalves and Helder Araújo (2002, September). Estimation of 3D motion from stereo images-Uncertainty analysis and experimental results. In IEEE/RSJ International Conference on Intelligent Robots and Systems (Vol. 1, pp. 7-12). IEEE. DOI: 10.1109/IRDS.2002.1041353.
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
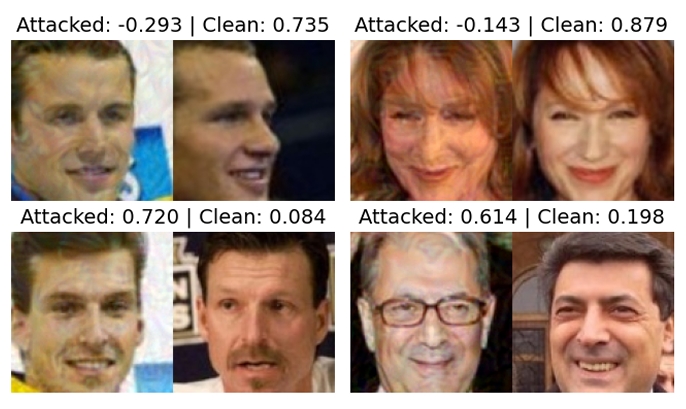
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security