Improved Depth Estimation Algorithm using Plenoptic Cameras
Featured in:
MD Thesis
Authors:
Joel Cunha
Abstract
Plenoptic cameras open new possibilities to the world of photography, allowing to capture more information at a single moment with a single camera. With a single image captured by these cameras we are able to estimate depth and create a fully focused image. In this thesis we present an automatic algorithm to create a depth map and a fully focused image, using as input only a raw plenoptic image and few calibration parameters. The depth estimation starts with a RANSAC-like algorithm and then the points estimated are submitted to an outlier removal filter. Finally, it is created a dense depth map. We also present an algorithm for the image synthetization (rendering). As for the depth estimation improvements introduced we studied new lenses patterns. Within the RANSAC-like algorithm there is a correspondence search within neighbor lenses. We then studied different neighbor lenses arrangements (by analyzing lenses of different focal lengths and distances from to the target micro lens). We also implemented a coarse depth map, where this map has the depth to each individual micro lens. We also present a methodology to create synthetic plenoptic data, useful to compare the depth estimated with the true depth values. Therefore with the synthetic data we were able to assess the estimation of the depth values and analyze its error. This method to create synthetic data allowed to study different parameters in order to improve our own work or provide guidelines for future work. Finally our algorithm was tested with real plenoptic images provided by Raytrix. Because Raytrix depth estimation and image rendering is a proprietary algorithm and, therefore, we are challenged to achieve our results with our own ingenuity and resources.
Citation
Joel Cunha (2015), Improved Depth Estimation Algorithm using Plenoptic Cameras. MD Thesis. University of Coimbra, 2015.
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
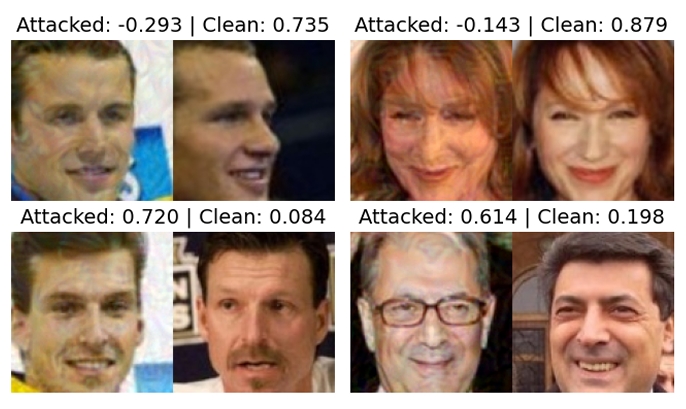
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security