Projection Model, 3D Reconstruction and Rigid Motion Estimation from Non-central Catadioptric Images
Featured in:
2nd International Symposium on 3D Data Processing, Visualization and Transmission, Thessaloniki, Greece
Authors:
Nuno Gonçalves and Helder Araújo
Abstract
This paper addresses the problem of rigid motion estimation and 3D reconstruction in vision systems where it is possible to recover the incident light ray direction from the image points. Such systems include pinhole cameras and catadioptric cameras. Given two images of the same scene acquired from two different positions, the transformation is estimated by means of an iterative process. The estimation process aims at having corresponding incident rays intersecting at the same 3D point. Geometrical relationships are derived to support the estimation method. Furthermore, this paper also addresses the problem of the mapping from 3D points to image points, for non-central catadioptric cameras with mirror surfaces given by quadrics. The projection model presented can be expressed in a non-linear equation of only one variable, being more stable and easier to solve than the classical Snell’s law. Experiments with real images are presented, by using simulated annealing as estimation method.
Citation
Nuno Gonçalves and Helder Araújo (2004, September). Projection model, 3D reconstruction and rigid motion estimation from non-central catadioptric images. In Proceedings. 2nd International Symposium on 3D Data Processing, Visualization and Transmission, 2004. 3DPVT 2004. (pp. 325-332). IEEE. DOI: 10.1109/TDPVT.2004.1335221
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
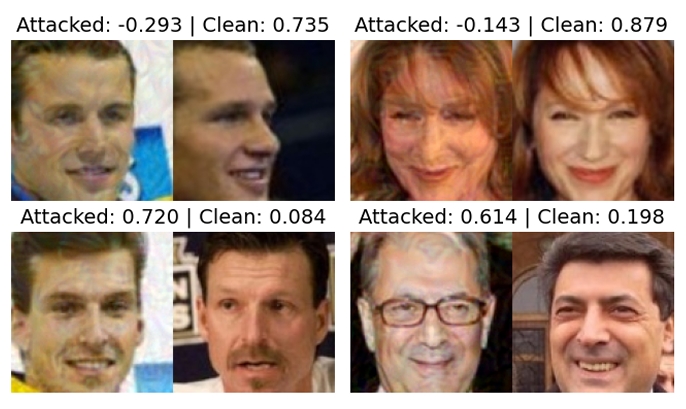
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security