2009 IEEE 12th International Conference on Computer Vision Workshops, ICCV Workshops, Kyoto, Japan
Authors:
Nuno Gonçalves and Ana Catarina Nogueira
Abstract
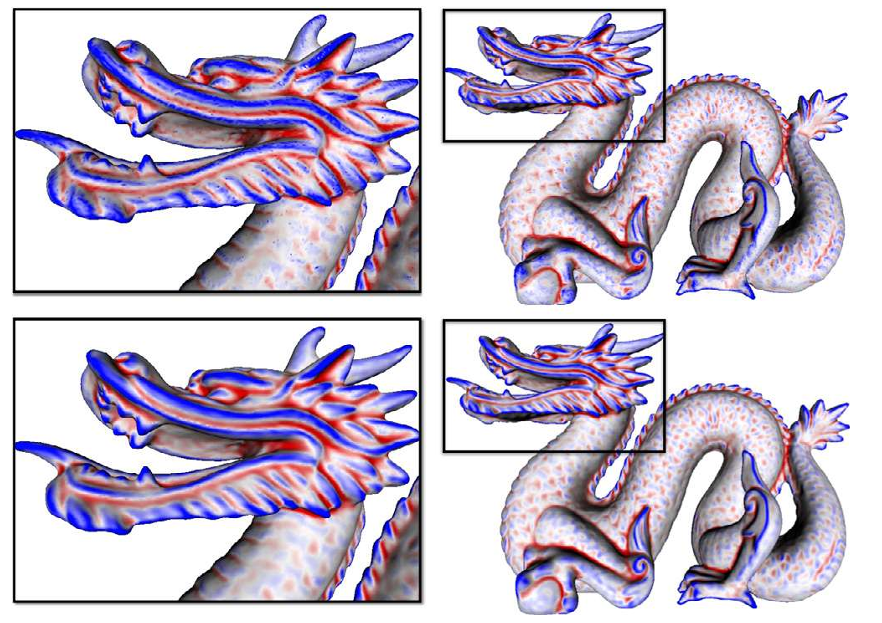
This paper presents a novel framework to project 3D points through curved mirrors to an image device. The problem solved is the search for the reflection point for an arbitrary vision system with a quadric shaped mirror. The main advantage claimed for the framework presented is its computer efficiency while providing better accuracy since the search for the reflection point is made in a parameterized curve that is function of a single unknown. The alternative solvers are the classical Snell Law and the Fermat Principle that, as proved in experiments, present a much slower convergence than the new method since they have a multidimensional search space rather than a unidimensional one. This new method can be used to speed up calibration of noncentral catadioptric systems based on reprojection error. It can also be used for rendering purposes since it enhances the performance of the projection of points through mirrors while enhancing its accuracy, whether the mirror is part of the vision system (catadioptric camera) or if it is only a specular surface in the scene that reflects light in arbitrary directions. Another application of this framework is for illumination purposes, providing a faster way to compute reflected light direction or for the computation of the direction of the light source. Experiments in performance evaluation show the usefulness of the method presented.
Citation
Nuno Gonçalves and Ana Catarina Nogueira (2009, September). Projection through quadric mirrors made faster. In 2009 IEEE 12th International Conference on Computer Vision Workshops, ICCV Workshops (pp. 2141-2148). IEEE. DOI: 10.1109/ICCVW.2009.5457545