Social NSTransformers: Low-Quality Pedestrian Trajectory Prediction
Featured in:
IEEE Transactions on Artificial Intelligence
Authors:
Zihan Jiang; Yiqun Ma; Bingyu Shi; Xin Lu; Jian Xing; Nuno Gonçalves; Bo Jin
Abstract
This paper introduces a novel model for low-quality pedestrian trajectory prediction, the Social Non-stationary Transformers (NSTransformers), that merges the strengths of NSTransformers and Spatio-Temporal graph transformer (STAR). The model can capture social interaction cues among pedestrians and integrate features across spatial and temporal dimensions to enhance the precision and resilience of trajectory predictions. We also propose an enhanced loss function that combines diversity loss with logarithmic root mean squared error (log-RMSE) to guarantee the reasonableness and diversity of the generated trajectories. This design adapts well to complex pedestrian interaction scenarios, thereby improving the reliability and accuracy of trajectory prediction. Furthermore, we integrate a Generative Adversarial Network (GAN) to model the randomness inherent in pedestrian trajectories. Compared to the conventional standard Gaussian distribution, our GAN approach better simulates the intricate distribution found in pedestrian trajectories, enhancing the trajectory prediction’s diversity and robustness. Experimental results reveal that our model outperforms several state-of-the-art methods. This research opens the avenue for future exploration in low-quality pedestrian trajectory prediction.
Citation
Zihan Jiang, Yiqun Ma, Bingyu Shi, Xin Lu, Jian Xing, Nuno Gonçalves and Bo Jin (2024). Social NSTransformers: Low-Quality Pedestrian Trajectory Prediction. In IEEE Transactions on Artificial Intelligence, vol. 5, no. 11; pages 5575-5588. DOI: 10.1109/TAI.2024.3421175.
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
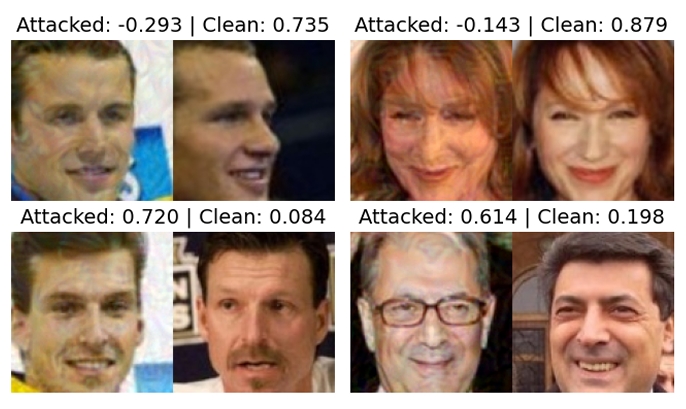
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security