Linear solution for the pose estimation of noncentral catadioptric systems
Featured in:
2007 IEEE 11th International Conference on Computer Vision Workshops, Rio de Janeiro, Brazil
Authors:
Nuno Gonçalves and Helder Araújo
Abstract
This paper presents a linear method to estimate the pose of a noncentral catadioptric system with a quadric shaped mirror in relation to a world reference frame (or local reference frame without loss of generality). The vision system is assumed to be calibrated. The method uses also as input data the structure of the scene. It is proved that any reflection point should belong to an analytical quadric that intersects the mirror quadric itself. This constraint can be written linearly in the 3D scene point coordinates (in the camera reference frame). The unknown pose screw transformation that relates camera and world reference frames can then be used in the linear model, allowing for the construction of a linear equation in the pose transformation elements. Additional constraints are used to force the estimated rotation elements to build an orthogonal matrix. Tests with simulated data and also on real images with different mirrors proved the method to be consistent and to estimate the pose accurately. However, it was also observed that the method is sensitive to noise. The results are compared with another method.
Citation
Nuno Gonçalves and Helder Araújo (2007, October). Linear solution for the pose estimation of noncentral catadioptric systems. In 2007 IEEE 11th International Conference on Computer Vision (pp. 1-7). IEEE. DOI: 10.1109/ICCV.2007.4409197
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
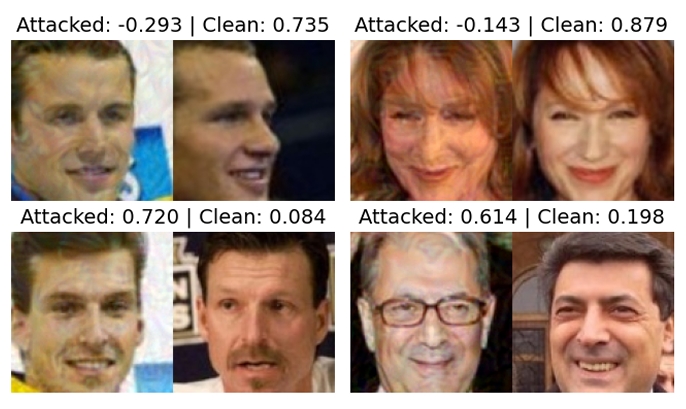
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security