Multimodal CNN Pedestrian Classification: A Study on Combining Lidar and Camera Data
Featured in:
21st IEEE International Conference on Intelligent Transportation Systems, Hawaii, USA
Authors:
Gledson Melotti, Cristiano Premebida, Nuno Gonçalves, Urbano Nunes and Diego Faria
Abstract
This paper presents a study on pedestrian classification based on deep learning using data from a monocular camera and a 3D LIDAR sensor, separately and in combination. Early and late multi-modal sensor fusion approaches are revisited and compared in terms of classification performance. The problem of pedestrian classification finds applications in advanced driver assistance system (ADAS) and autonomous driving, and it has regained particular attention recently because, among other reasons, safety involving self-driving vehicles. Convolutional Neural Networks (CNN) is used in this work as classifier in distinct situations: having a single sensor data as input, and by combining data from both sensors in the CNN input layer. Range (distance) and intensity (reflectance) data from LIDAR are considered as separate channels, where data from the LIDAR sensor is feed to the CNN in the form of dense maps, as the result of sensor coordinate transformation and spatial filtering; this allows a direct implementation of the same CNN-based approach on both sensors data. In terms of late-fusion, the outputs from individual CNNs are combined by means of learning and non-learning approaches. Pedestrian classification is evaluated on a `binary classification’ dataset created from the KITTI Vision Benchmark Suite, and results are shown for each sensor-modality individually, and for the fusion strategies.
Citation
Gledson Melotti, Cristiano Premebida, Nuno Gonçalves, Urbano Nunes and Diego Faria (2018, November). Multimodal CNN pedestrian classification: a study on combining LIDAR and camera data. In 2018 21st International Conference on Intelligent Transportation Systems (ITSC) (pp. 3138-3143). IEEE. DOI: 10.1109/ITSC.2018.8569666
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
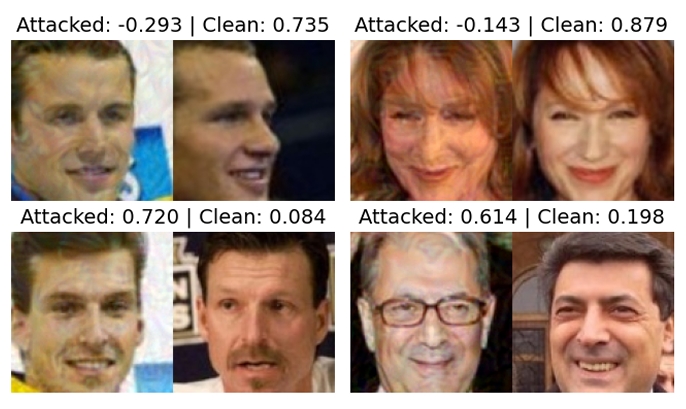
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security