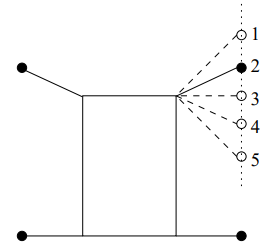
This paper describes the study of algorithms to obtain static or marginally static gaits. Some of them are similar to the walking gaits used by some mammals, e.g. horses, cows, etc.. It describes a methodology for deriving the inverse kinematics of a quadruped. It then explains an algorithm which implements an exhaustive search of static gaits using a formal description of the robot. A similar method is applied to implement on a quadruped robot the most common walking gaits seen in animals. 1625 stable and 400 marginally stable robot configurations were found using our stability test algorithm. Using these results in the first algorithm, 848 static gaits and 141424 marginally static gaits were found. By applying the second algorithm were found 15 walking gaits and were analysed to determine their stability margins (which is the minor of the minimum distance of the mass centre to the border of the supporting polygon formed by the legs in contact with the ground). The method can be used to determine similar gaits on walking systems with any number of legs.
Citation
Carlos Queiroz, Nuno Gonçalves and Paulo Menezes (1999). A study on static gaits for a four leg robot. In Proc. Control-UK ACC Int. Conf. Control (pp. 1-6).
FLOWING: Implicit Neural Flows for Structure-Preserving Morphing
Authors: Arthur Bizzi; Matias Grynberg; Vitor Matias; Daniel Perazzo; João Paulo Lima; Luiz Velho; Nuno Gonçalves; João Pereira; Guilherme Schardong; Tiago Novello
Featured in: 39th Conference on Neural Information Processing Systems (NeurIPS 2025)
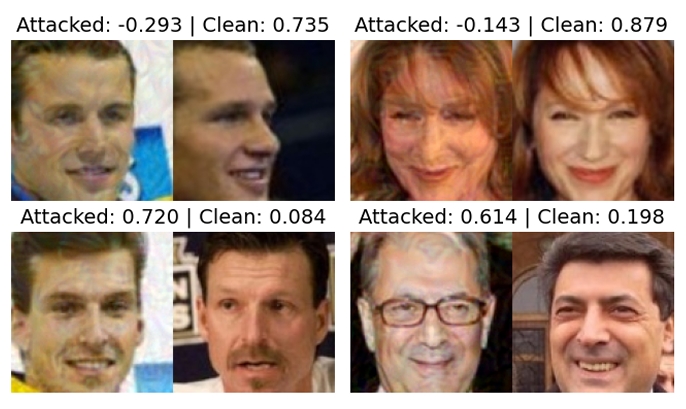
Adversarial Attack Challenge for Secure Face Recognition 2025
Authors: João Tremoço, Iurii Medvedev, Nuno Freitas, Andreia Costa, Diogo Nunes, Niklas Bunzel, Lukas Graner, Nicholas Göller, Lorenzo Pellegrini, Nicolò Di Domenico, Guido Borghi, Monson Verghese, Shruti Bhilare, Avik Hati, Miguel Lourenço, Nuno Gonçalves
Featured in: IEEE International Joint Conference on Biometrics (IJCB 2025)
VOIDFace: A Privacy-Preserving Multi-Network Face Recognition With Enhanced Security