Multi-Focus Plenoptic Simulator and Lens Pattern Mixing for Dense Depth Map Estimation
Featured in:
37th Eurographics 2016, Lisbon, Portugal
Authors:
Rodrigo Ferreira, Joel Cunha and Nuno Gonçalves
Abstract
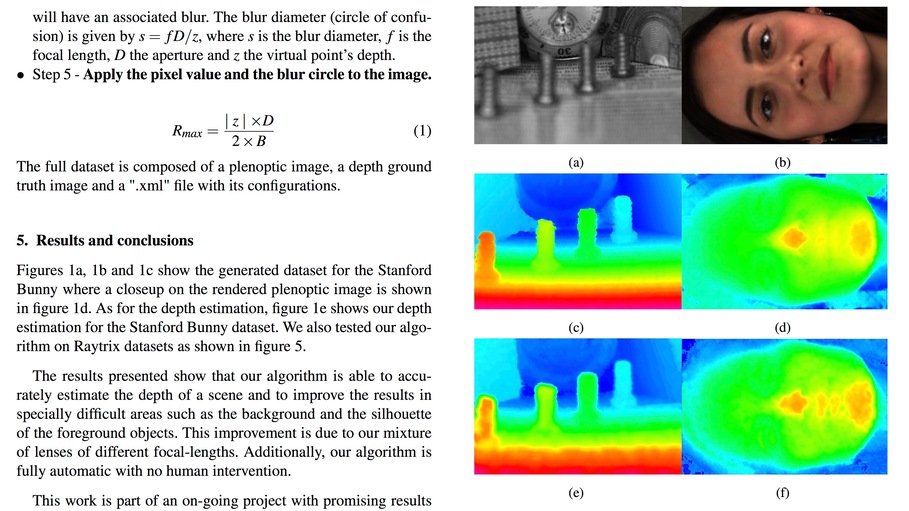
Light field cameras capture a scene’s multi-directional light field with one image, allowing the estimation of depth. In this paper, we introduce a fully automatic method for depth estimation from a single plenoptic image running a RANSAC-like algorithm for feature matching. The novelty about our method is the use of different focal-length lenses for multiple depth map refining, generating a dense depth map for future all-in-focus renders. We also present a plenoptic simulator which produces a plenoptic dataset from a 3D computer rendered scene. This simulator, which is unique, as far as we known, allows testing of plenoptic oriented algorithms since it can reproduce datasets with desired scene characteristics, providing the depth ground truth for error measurement. This work is a on-going project with promising results.
Citation
Rodrigo Ferreira, Joel Cunha and Nuno Gonçalves (2016, May). Multi-focus plenoptic simulator and lens pattern mixing for dense depth map estimation. In Proceedings of the 37th Annual Conference of the European Association for Computer Graphics: Short Papers (pp. 37-40). DOI: 10.2312/egsh.20161009