Unsupervised intrinsic calibration from a single frame using a ”plumb-line” approach
Featured in:
IEEE International Conference on Computer Vision. Sydney, Australia
Authors:
Rui Melo, Michel Antunes, João P. Barreto, Gabriel Falcão and Nuno Gonçalves
Abstract
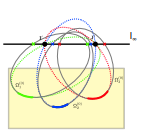
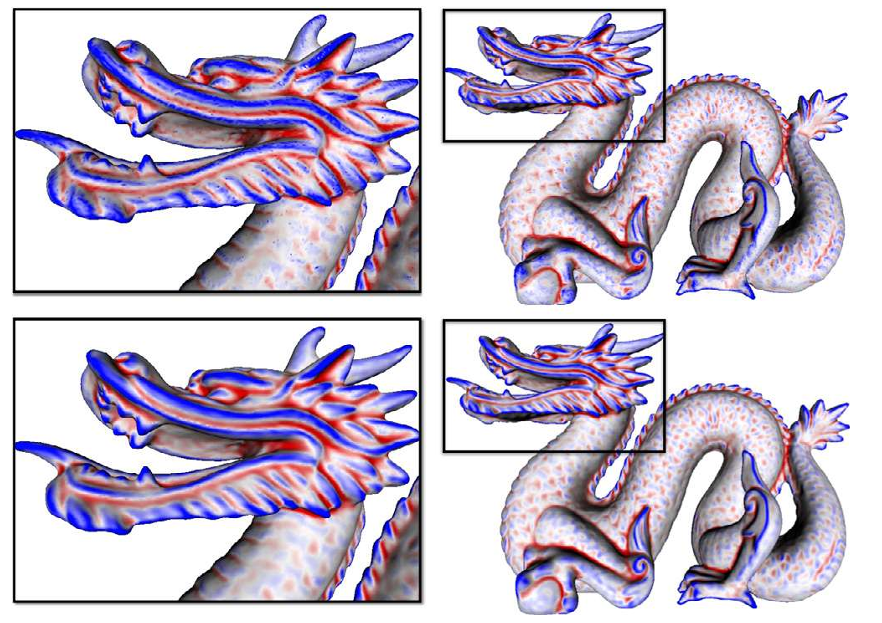
Estimating the amount and center of distortion from lines in the scene has been addressed in the literature by the socalled “plumb-line” approach. In this paper we propose a new geometric method to estimate not only the distortion parameters but the entire camera calibration (up to an “angular” scale factor) using a minimum of 3 lines. We propose a new framework for the unsupervised simultaneous detection of natural image of lines and camera parameters estimation, enabling a robust calibration from a single image. Comparative experiments with existing automatic approaches for the distortion estimation and with ground truth data are presented.
Citation
Rui Melo, Michel Antunes, João P. Barreto, Gabriel Falcão and Nuno Gonçalves (2013). Unsupervised intrinsic calibration from a single frame using a” plumb-line” approach. In Proceedings of the IEEE International Conference on Computer Vision (pp. 537-544). DOI: 10.1109/ICCV.2013.72