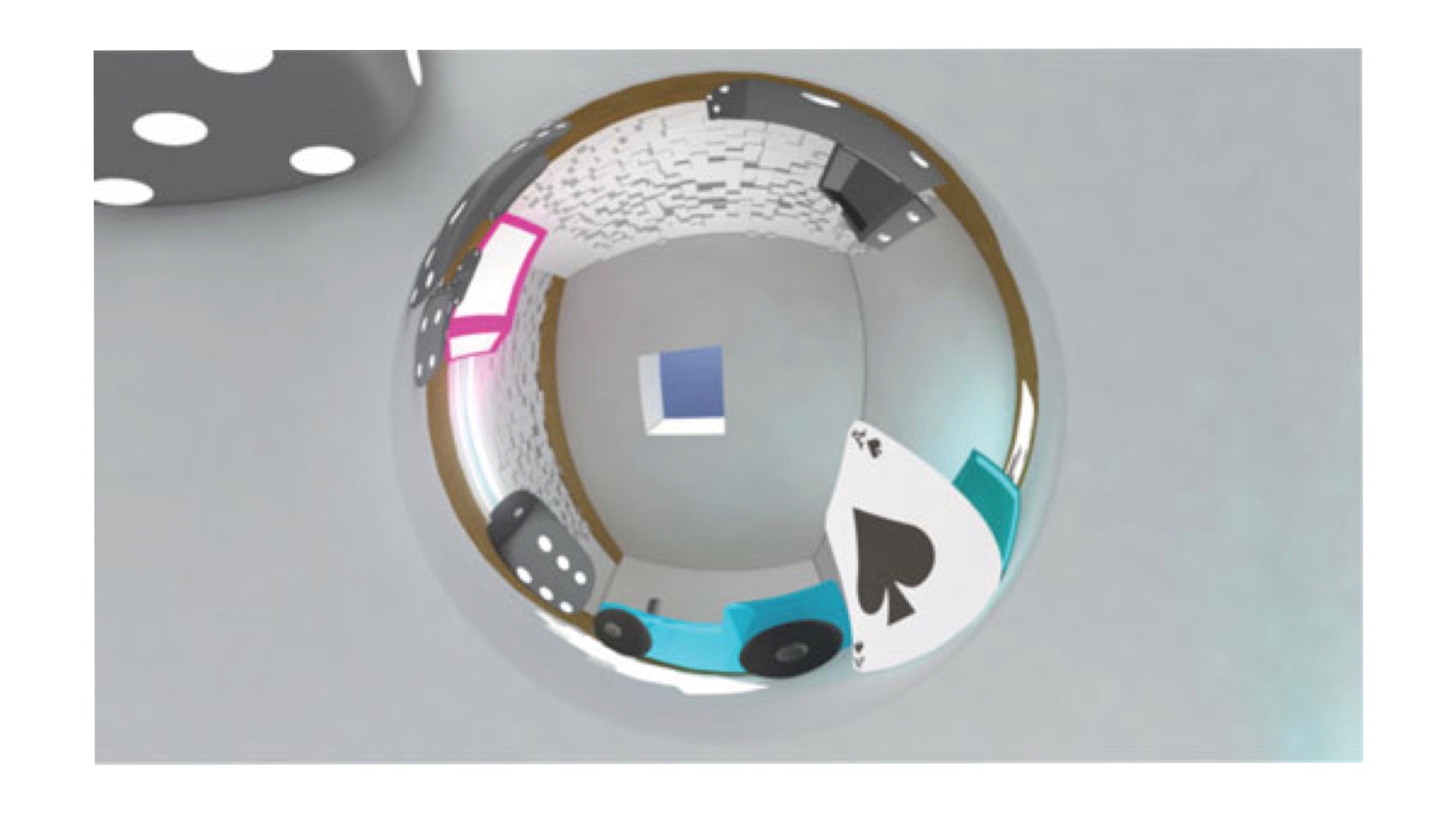
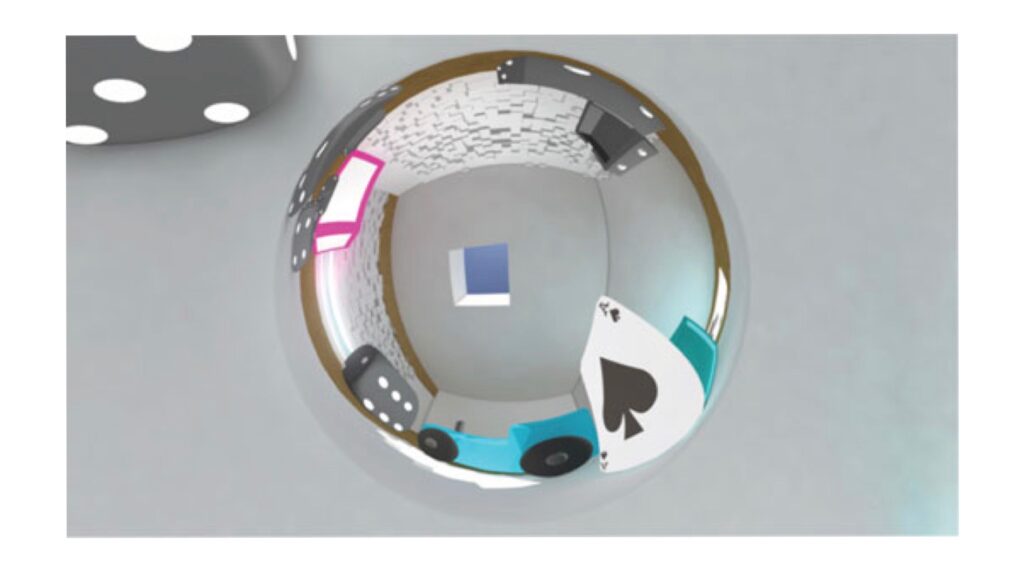
Forward Projection Model of Noncentral Catadioptric Cameras with Spherical Mirrors
Featured in:
ROBOTICA University of Cambridge
Authors:
Nuno Goncalves, Ana Catarina Nogueira and Andre Lages Miguel
Abstract
Non-central catadioptric vision is widely used in robotics and vision but suffers from the lack of an explicit closed-form forward projection model (FPM) that relates a 3D point with its 2D image. The search for the reflection point where the scene ray is projected is extremely slow and unpractical for real-time applications. Almost all methods thus rely on the assumption of a central projection model, even at the cost of an exact projection.Two recent methods are able to solve this FPM, presenting a quasi-closed form FPM. However, in the special case of spherical mirrors, further enhancements can be made. We compare these two methods for the computation of the FPM and discuss both approaches in terms of practicality and performance. We also derive new expressions for the FPM on spherical mirrors (extremely useful to robotics and graphics) which speed up its computation.
Citation
Nuno Goncalves, Ana Catarina Nogueira and Andre Lages Miguel (2017). Forward projection model of non-central catadioptric cameras with spherical mirrors. Robotica, 35(6), 1378-1396. DOI: 10.1017/S026357471600014X