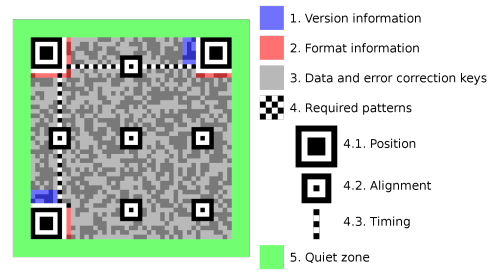
Method for the rectification of 2D barcodes in curved surfaces- the use cases of QR Code and UniQode
Featured in:
MD Thesis
Authors:
Rafael Marques
Abstract
Two-dimensional machine readable codes, such as the QR Code, have become an essential partof several industries due to their very good portability and the ability to effectively store data.These codes are used in a variety of applications, such as advertising, inventory tracking, mobile payments and even in security applications. However, the decoding of such codes can bechallenging when the codes are distorted, for example, due to printing errors, camera angle, orlens distortion.One particular type of distortion that can affect these codes is cylindrical distortion, whichoccurs when a code is printed or placed on a cylindrical surface, such as a can or bottle, causingthe code to be distorted when viewed through a camera lens. This distortion can make it difficultfor code scanners to decode the information stored in the code and is amplified when the camerais not perpendicular in relation to the code.In recent years, different types of these two-dimensional machine readable codes emerged,each with their particular advantages and disadvantages. In this thesis we explore a methodto correct the distortion in cylindrical surfaces of the QR Code, which is the most known andused two-dimensional code, and the Graphic Code (UniQode system), a new code developed byresearchers from the Institute of Systems and Robotics of University of Coimbra.The method proposed is tested on two different datasets that cover virtual and real-lifescenarios codes with cylindrical distortion. To replicate real-life situations more accurately andincrease the difficulty level, we also introduce different angles of slope, rotation, and tilt duringthe testing process. The results of this research can have significant practical applications,especially in industries that heavily rely on QR codes for inventory management and tracking.A more efficient and accurate method for decoding cylindrical distorted QR codes can lead toimproved productivity and cost savings for businesses.
Citation
Rafael Marques (2023), Method for the rectification of 2D barcodes in curved surfaces- the use cases of QR Code and UniQode. MD Thesis. University of Coimbra, 2023.