Partial Calibration and Mirror Shape Recovery for Non-central Catadioptric Systems
Publication featured in: 6th Workshop on Omnidirectional Vision, Camera Networks and Non-Classical Cameras, in conjunction with the ICCV’05, Beijing, China
Resource featured in: 6th Workshop on Omnidirectional Vision, Camera Networks and Non-Classical Cameras, in conjunction with the ICCV’05, Beijing, China
Partial Calibration and Mirror Shape Recovery for Non-central Catadioptric Systems
Featured in:
6th Workshop on Omnidirectional Vision, Camera Networks and Non-Classical Cameras, in conjunction with the ICCV’05, Beijing, China
Authors:
Nuno Gonçalves and Helder Araújo
Abstract
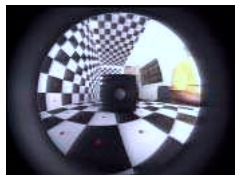
In this paper we present a method for mirror shape recov-ery and partial calibration for non-central catadioptric sys-tems. This method is based on an existing algorithm for cal-ibration of general vision systems. In addition only two im-ages are required for both mirror shape recovery and par-tial calibration instead of three as in the original algorithm. On the other hand the knowledge of the parameters of the primary vision system is required. In this paper collinear-ity is used to constrain the position of three points in each ray. Transformation matrices convert the local coordinates (known) into world coordinates or equivalently, estimate the motion of the calibration object between the two posi-tions. The third point is defined as the intersection between the incident and reflected rays. In order for three points be-ing collinear four tensor equations must be satisfied. These tensor equations depend on the motion parameters. Once the motion parameters are computed, the ray in space cor-responding to each pixel can be estimated. Its intersection with the camera ray yields the coordinates of a mirror point. Simulations and real experiments showed that the solution is possible and accurate, although very sensitive to errors.
Citation
Nuno Gonçalves and Helder Araújo (2005). Partial calibration and mirror shape recovery for non-central catadioptric systems. In Proceedings of the 6th Workshop on Omnidirectional Vision, Camera Networks and Non-Classical Cameras, Beijing, China.
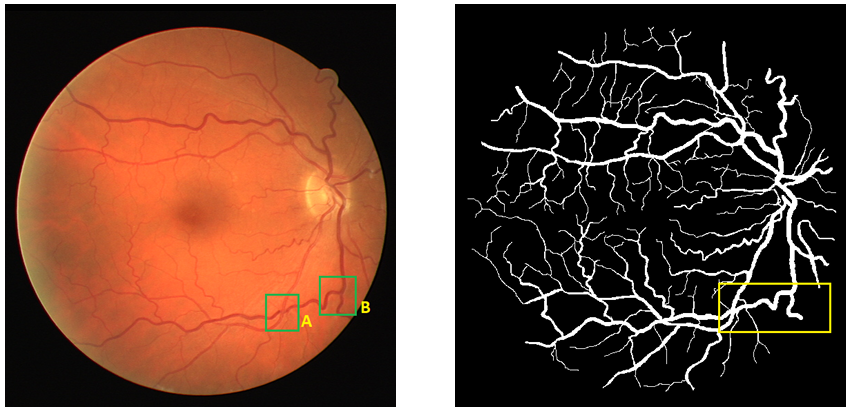
Book of Extended Abstracts of the 12th Iberian Conference on Pattern Recognition and Image Analysis (IbPRIA 2025)
Authors: Aitana Menárguez-Box; Angel Navarro; Antonio Requena Jiménez; Brenda Nogueira; Dylan Perdigão; Farhad Shadmand; Iurii Medvedev; Marco Alexandre Tomás Tereso; Maria del Mar Coch-Alcina; Matheus Kovaleski; Miguel Leão; Teresa M.C. Pereira; Tomás Silva Santos Rocha
Featured in: 12th Iberian Conference on Pattern Recognition and Image Analysis (IbPRIA 2025)
How to Rethink Education with Artificial Intelligence: The Portuguese Use Case from Political and Practical Perspectives
Authors: Nuno Gonçalves; Maria Helena Monteiro
Featured in: Futures'2025 Conference Artificial Intelligence in Education
suggested news
Four papers presented @ IbPRIA 2025
Prof. Nuno participates in Conference on Digital Governance
ISR-UC maintains the “Excellent” rating in FCT evaluation!
RECENT PROJECTS
FACING2 – Face Image Understanding
VISUAL-ID – Unique Visual Identities in Graphics, Images and Faces
UniqueMark
Institute of Systems and Robotics Department of Electrical and Computers Engineering University of Coimbra